
한국자동차공학회(KSAE) 2025년 춘계 학술대회에서 5월 21일 논문을 발표하였습니다.
현대오토에버 연구원분들과 함께 진행하고 있는 연구 중, 일부 중간 과정을 정리한 내용이라 아직은 부족함이 많지만 조금씩 발전 시켜나갈 예정에 있습니다.
발표 자료 작성과 발표 하시느라 수고하신 현대오토에버 김현성책임과 함께한 모든분들께 이자리를 빌어 감사의 말씀 전합니다.
1. 배경과 문제 정의: ECU 중심 분석의 한계
ISO 26262에서는 전기전자 시스템에서의 기능안전(Functional Safety)을 확보하기 위해 HARA(Hazard Analysis and Risk Assessment)를 수행하고, 이에 따라 ASIL(Automotive Safety Integrity Level)을 할당합니다. 그러나 실제 산업 현장에서는 기능을 ECU 단위로 분절하여 Hazard를 식별하고 ASIL을 개별적으로 할당하는 방식이 일반적으로 사용되어 왔습니다. 이로 인해 다음과 같은 문제가 발생합니다.
- 중복 Hazard 식별: 동일한 기능 또는 유사한 운용 조건을 가지는 ECU 간에 중복된 위험이 과도하게 식별됨.
- 누락 Hazard 발생: ECU 간 상호작용이나 시스템 간 기능 통합에서 발생하는 복합적인 위험 요소가 간과됨.
- 과도한 안전 요구사항: 중복 분석과 높은 ASIL 요구로 인해 불필요한 요구사항이 증가하고, 개발 자원 낭비 초래.
이에 따라, 개별 ECU 중심의 분석을 넘어서 차량 레벨에서 기능안전성을 통합적으로 검토할 수 있는 새로운 프레임워크가 요구되었습니다.

2. 프레임워크 개요: Vehicle Level Functional Safety Framework
이 프레임워크는 3단계 절차로 구성되며, 각 단계는 차량의 기능안전성을 체계적으로 확보하기 위한 연속적인 분석 활동을 포함합니다.

2.1 Step 1: ECU 개별 Hazard 식별
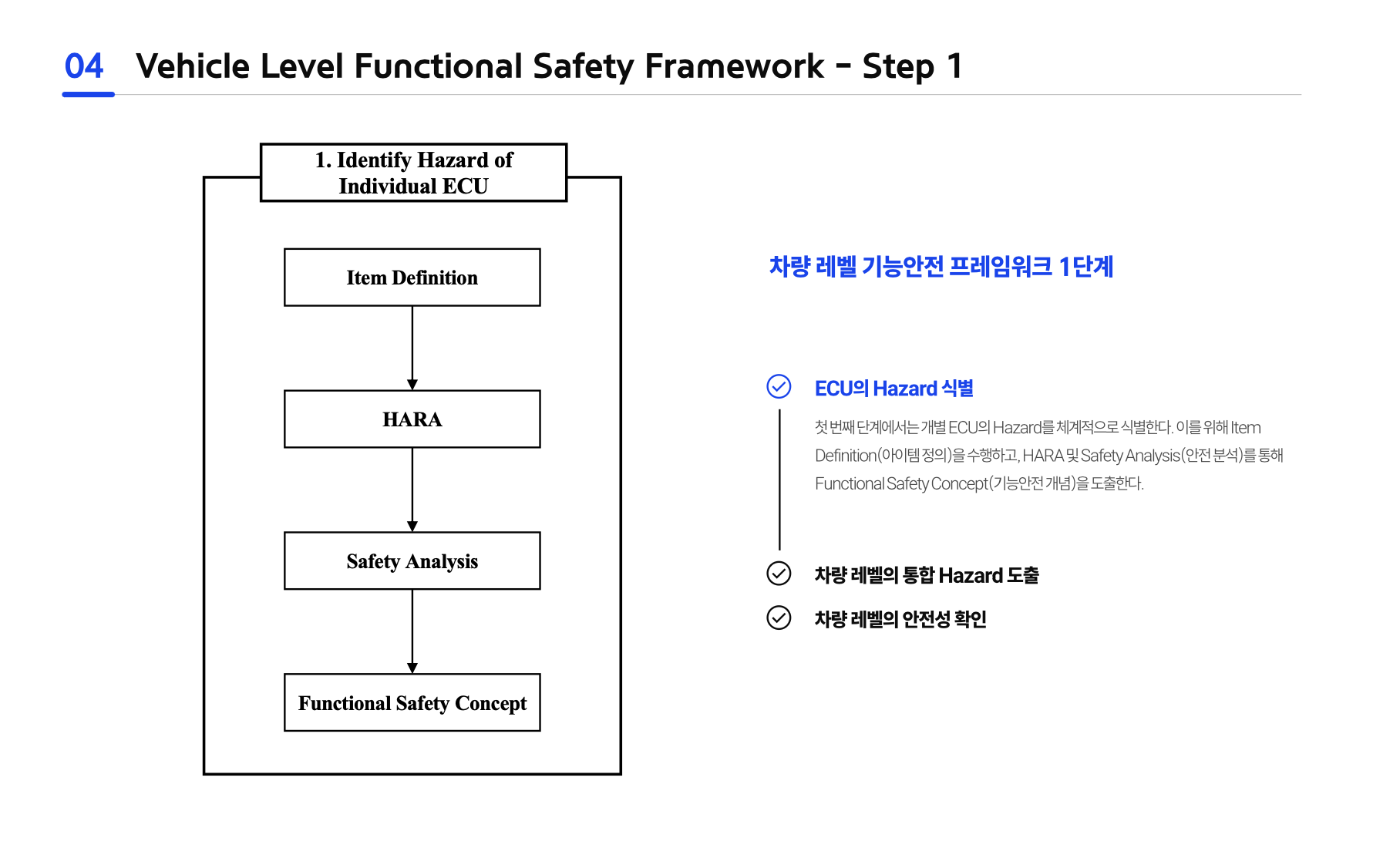
- Item Definition: 각 ECU에 대해 기능 및 기술적 특성을 정의하고 사용 조건을 명확히 설정
- HARA 및 Safety Analysis: 위험 시나리오를 분석하고 Safety Goal을 도출
- Functional Safety Concept 정립: FSC 및 대응 메커니즘 설계
2.2 Step 2: 차량 레벨 통합 Hazard 도출

- Integrated Hazard 조건 정의
- 기능 유사성
- 운용 조건 유사성
- 위험 시나리오 유사성
- Final Integrated Hazard 도출
- 중복 Hazard를 하나의 통합된 위험 요소로 정리
- 차량 전체의 기능 관점에서 의미 있는 분석 수행
2.3 Step 3: 차량 레벨 안전성 확인

3. ASIL 재분배 (ASIL Re-allocation)

- FTA (Fault Tree Analysis), DFA (Dependent Failure Analysis), ASIL Decomposition 적용
- 중복 Hazard 제거 또는 ASIL 등급 조정
- 기능 간 중복 제거로 최적화된 자원 배분 유도
4. ASIL 검토 (ASIL Inspection)

- 차량 수준에서 Hazard 경로(Path of Hazard)를 추적
- 누락 Hazard 식별 및 보완 요구사항 도출
- CAN 신호, 스위치 등 입력 신호의 ASIL 일관성 확인
5. 실제 적용 사례: 기능안전 최적화 효과
본 프레임워크는 실제 차량 시스템(예: 제동 시스템, 주행 컨트롤)에 적용되어 다음과 같은 효과를 입증하였습니다.

- 중복 Hazard 9건 식별, 그로 인해 기존 안전 요구사항 27건 제거
- 누락 Hazard 5건 새롭게 식별, 안전 요구사항 13건 추가 도출
- 예시: ‘차량 밀림(Rollaway)’, ‘주행 중 의도치 않은 제동’ 등 통합 Hazard로 정리
- Safety Path 분석을 통해 입력 신호의 ASIL 불일치 문제(예: ASIL C가 요구되지만 실제 입력이 ASIL A인 경우) 해결
이러한 사례를 통해 기능안전 요구사항의 정합성 향상, 개발 비용 절감, 시스템 복잡성 감소, 개선된 고객 안전 확보라는 실질적인 효과가 입증되었습니다.
6. 이 프레임워크의 의미: SDV, AI, 인프라 통합 시대의 대응
전통적인 내연기관 차량과 달리, SDV(Software Defined Vehicle), xEV(전동화 차량), 자율주행 기능 등은 복잡한 소프트웨어 기능 및 센서-인프라 융합을 요구합니다. 이러한 복잡성의 증가는 기존의 ECU 중심 기능안전 확보 방식으로는 대응이 어렵습니다.
특히 다음과 같은 환경에서 본 프레임워크의 활용도가 더욱 강조됩니다.
- AI 기반 자율주행 시스템: 머신러닝 모델과 안전 기능의 상호작용 확인
- 인프라 연계 시스템: 교통신호, 통신 기반 위험 회피 기능 포함
- OTA 기반 기능 업데이트: 기능 변경 시 차량 전체의 안전 재검토 필요
프레임워크는 이러한 환경 변화에 적응할 수 있도록 설계되었으며, SoS(System of Systems) 관점에서 차량 전체를 하나의 안전 분석 단위로 고려함으로써 차세대 차량 개발에 필수적인 기능안전 전략을 제공합니다.
7. 결론 및 향후 과제
본 차량 레벨 기능안전 프레임워크는 기능 간 상호작용을 고려한 통합적 Hazard 분석을 통해 실제 산업 현장에서의 적용 가능성과 효용성을 입증하였습니다. 향후에는 다음과 같은 확장이 필요합니다.
- 다양한 도메인에 적용 확대: 제동 시스템을 넘어 파워트레인, ADAS, HMI 등 전체 시스템에 적용
- 자동화 도구 연계: HARA 및 ASIL 분석 자동화를 통한 프레임워크 내재화
- 글로벌 표준화 연계: ISO 26262, ISO/PAS 8800, SOTIF 등과의 정합성 확보
이 프레임워크는 산업계에 실질적인 기여를 하며, 기능안전 최적화를 위한 전략적 로드맵 수립에 핵심 역할을 할 것으로 기대됩니다.
'Automotive > ISO 26262 (기능안전)' 카테고리의 다른 글
| Ethernet 기반 차량 네트워크 설계에서 Functional Safety (ISO 26262) 고려사항 (SOME/IP & DDS) (0) | 2025.01.26 |
|---|---|
| ISO/PAS 8800: AI 기술, 아키텍처 및 개발 조치 선택 (0) | 2025.01.14 |
| ISO/PAS 8800: AI 안전 요구사항 도출 (Derivation of AI Safety Requirements) (1) | 2025.01.09 |
| ISO/PAS 8800: AI 시스템을 위한 안전 분석 (Safety Analysis of AI Systems) (0) | 2025.01.07 |
| ISO/PAS 8800: AI 시스템 안전을 위한 기존 안전 표준과의 연계 (ISO 26262와 ISO 21448) (1) | 2025.01.06 |